E-GRA Robot Arm with Keypad Controller Programming Example
04 Apr
Posted ByMercado Roma0 Comment(s)3935 View(s)
E–Gizmo Robotic Arm Keypad Controller with gizDuino ATmega328 UNO (Project Making)
An Entry Level Robotic Arm for Pick N’ Place
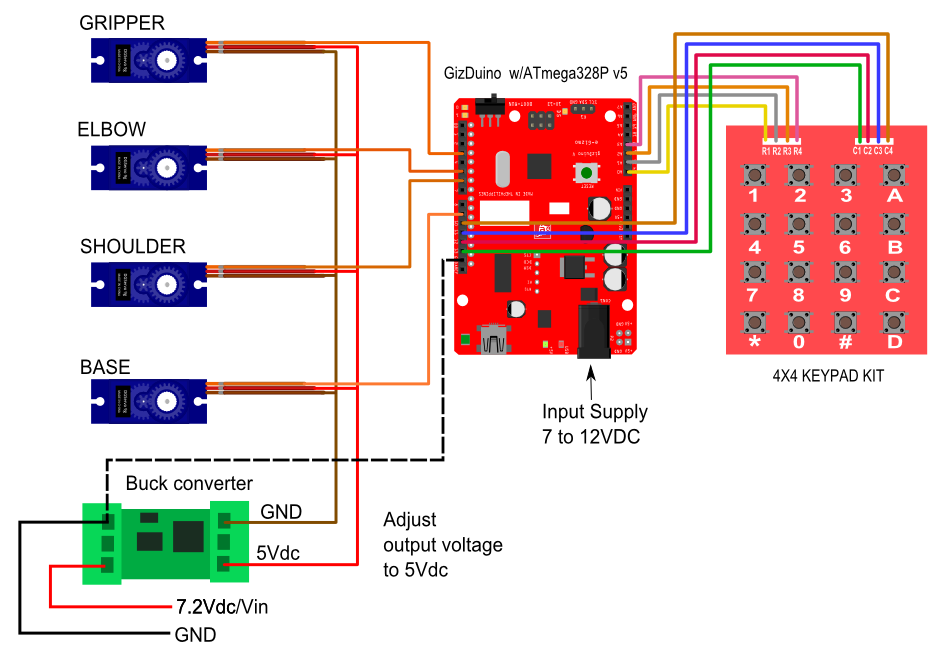
Works with USB (**5V Input Supply), additional features 4 suction caps that you can attach on the wall such as glass, metals etc. using suction cup and 4 servo motors.
* In Buck converter (Optional), check the voltage output 5V for the Servo Motors.
** Caution: If you want to use it with USB powered, please make sure you calibrated the degrees of each servos correctly, before you plug-in the USB. If the servo motor gets stuck in a long time, it will be broken. ( The servo gets heat or there’s an annoying sounds if it is stuck up). Remove immediately any source of power supply then adjust your code for the initial position:
int G_POS = 120; int E_POS = 70; int S_POS = 130; int B_POS = 80;
Also, adjust the range of each servo. Start in Gripper servo. Open the Serial Monitor. (You can unscrew the servo shaft to see end to end range for grabbing/releasing). See the Keypad Function (section).
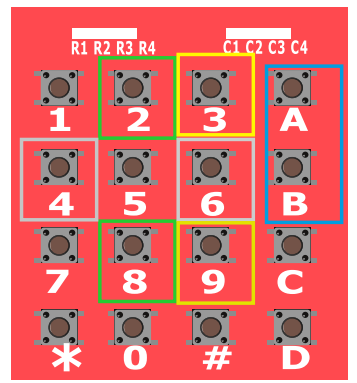
Pad Number/Letter Functions A ................... Gripper Grab/Hold B ................... Gripper Release 3 ................... Elbow Extend 9 ................... Elbow Retract 2 ................... Shoulder Turn Up 8 ................... Shoulder Turn Down 4 ................... Base Turn to the Left 6 ................... Base Turn to the Right




















 by
by