



















PBOT2018 and Ardublock – IR Collision sensors
04 Jul

Posted By
0 Comment(s)
1508 View(s)
Updated: 5/17/21
COLLISION SENSORS SECTIONS:
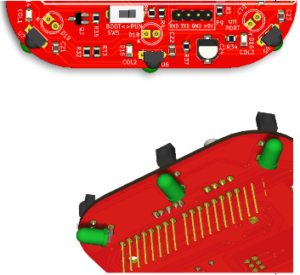
COL1 - right IR sensor U7 and D19
COL2 - center IR sensor U6 and D18
COL3 - left IR sensor U5 and D17
COL1 - right IR sensor U7 and D19 COL2 - center IR sensor U6 and D18 COL3 - left IR sensor U5 and D17
PROPER UPLOADING:
Press and Hold the SYS RST (SW3) then switch ON the Power (SW1)
and Click Upload. Release SYS RST when done.
Press and Hold the SYS RST (SW3) then switch ON the Power (SW1) and Click Upload. Release SYS RST when done.
PBOT 2018 FUNCTION REVIEW:
- Set IR collision sensor for reading if there’s a block or object detected
- Set IR collision sensor for reading if there’s a block or object detected
PBOT.COL1_RIGHT()
PBOT.COL2_CENTER()
PBOT.COL3_LEFT()
Notes: Output reads: No object detection = 0 or LOW; Object detected = 1 or HIGH
Ex.: 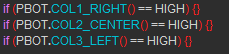
Notes: Output reads: No object detection = 0 or LOW; Object detected = 1 or HIGH
Ex.:
GET STARTED:
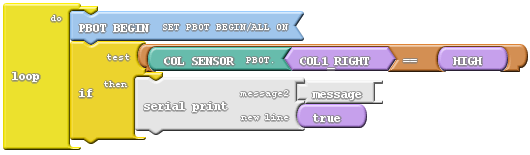
START WITH ADDING A BLOCK
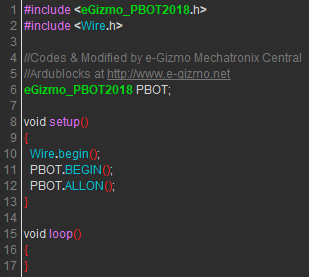
“PBOT BEGIN”
- Adding PBOT BEGIN Block - Setting Up the eGizmo_PBOT2018,Wire library and Turn ON all the Motors.
SERIAL MONITOR BY ADDING THE SERIAL PRINT BLOCK

USE THE DROP-DOWN ARROW TO SELECT SENSOR:

- Click the Drop-down arrow to select immediately the collision sensor.
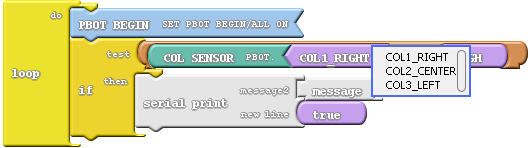
- As you can see the 3 IR Collision sensors appears.
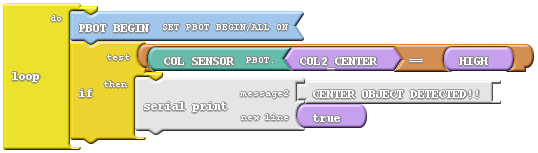
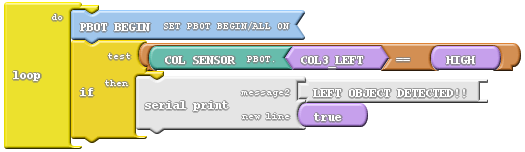
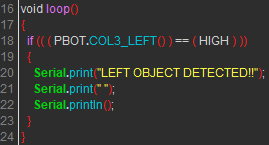
FOR OBJECT DETECTION
//Right


//Center

//Left
- For No Object detection = change the Mode of collision sensors to LOW.
- For No Object detection = change the Mode of collision sensors to LOW.
 by
by 
Leave a Comment